



KR C4控制器加热器产品介绍
声明:本媒体部分图片、文章来源于网络,
版权归原作者所有,如有侵权,请与我联系删除
首先,将固定工具的 TCP 告知机器人控制系统。 为此用一个已经测量过的工具移至 TCP。之后,将固定工具的坐标系取向告知机器人控制系统。 为此用户对一个已经测量过的工具坐标系平行于新的坐标系进行校准。 有两种方式:5D : 用户将工具的碰撞方向 告知机器人控制系统。 该碰撞方向默认为 X轴。 其他轴的取向将由系统确定,用户对此没有影响力。系统总是为其它轴确定相同的取向。 如果之后必须对工具重新进行测量,比如在发生碰撞后,仅需要重新确定碰撞方向。 而无需考虑碰撞方向的转度。6D : 用户将所有三个轴的取向告知机器人控制系统。
移至外部 TCP :

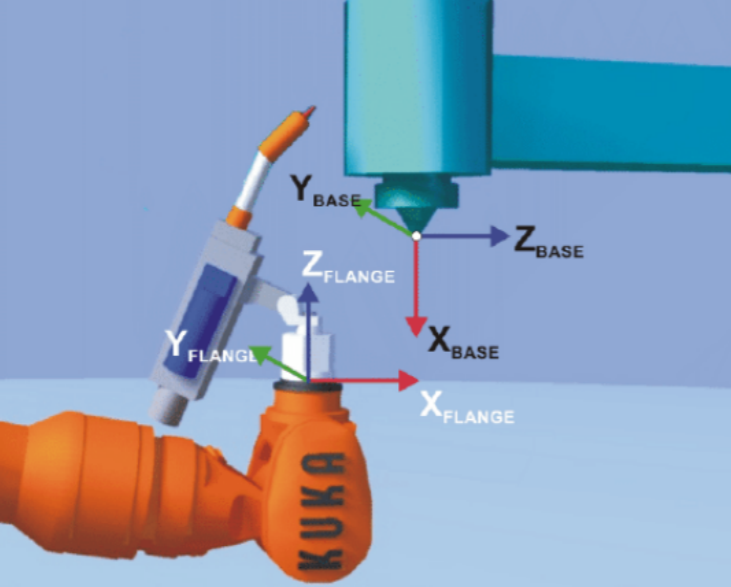
对坐标系进行平行校准:
具体步骤:
1. 在主菜单中选择 投入运行 > 测量 > 固定工具 > 工具 。
2. 为固定工具给定一个号码和一个名称。 用继续 键确认。
3. 输入已经测量过的工具编号。 用继续 键确认。
4. 在 5D/6D 栏中选择一种规格。 用继续 键确认。
5. 用已测量工具的 TCP 移至固定工具的 TCP。点击测量 。 用继续 键确认。
6. 如果选择 5D:
将 +X 基础坐标系 平行对准 -Z 法兰坐标系 。
(也就是将连接法兰调整至与固定工具的碰撞方向垂直的方向。 )
如果选择 6D:
应对连接法兰进行调整,使得它的轴平行于固定工具的轴:
+X 基础坐标系 平行于 -Z 法兰坐标系
(也就是将连接法兰调整至与工具的碰撞方向垂直的方向。 )
+Y 基础坐标系 平行于 +Y 法兰坐标系
+Z 基础坐标系 平行于 +X 法兰坐标系
7. 点击 测量 。 用继续 键确认。
8. 按下 保存 键。
更多机器人资讯请咨询:库卡机器人配件
