



KR C4控制器加热器产品介绍
声明:本媒体部分图片、文章来源于网络,
版权归原作者所有,如有侵权,请与我联系删除
当校正机器人时,把各轴移动到一个定义好的机械位置,即机械零点位置。这个机械零点要求轴移动到一个检测刻槽或划线标记定义的位置。如果机器人在机械零点位置,将存储各轴的检测值。 [一般 0 增量对 0 角度]。使用千分表盘或电子检测探头,按顺序移动机器人正确地到达机械零点位置。
机器人必须一直工作在相同的温度条件下,避免出现热膨胀引起的误差。这种校正方法必须注意:使机器人恒定在操作温度下,即始终在冷机或始终在热机状态下校正。
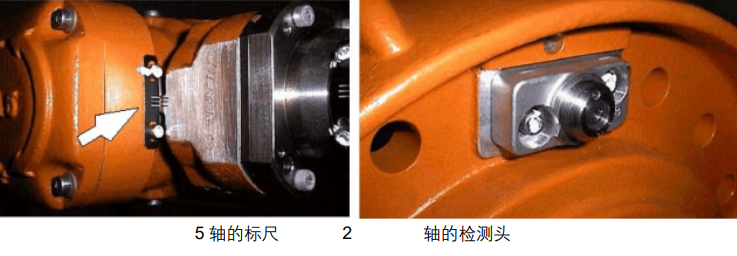
依靠机器人各轴上的标尺, 或安装千分表或电子检测探头的检测头。 具体情况依机器人型号来定。
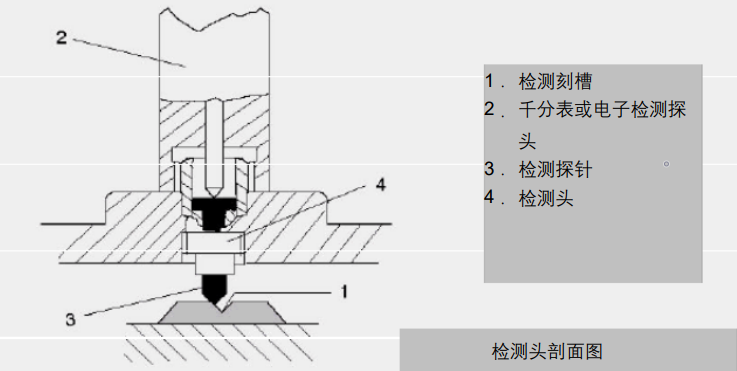
为了机器人的轴正好位于机械零点位置,首先必须先找到其预校正位置。然后将检测头的保护帽拿开,装上千分表或电子检测探头。电子检测探头插入机器人接线盒[接头 X32],从而连接到机器人控制装置。
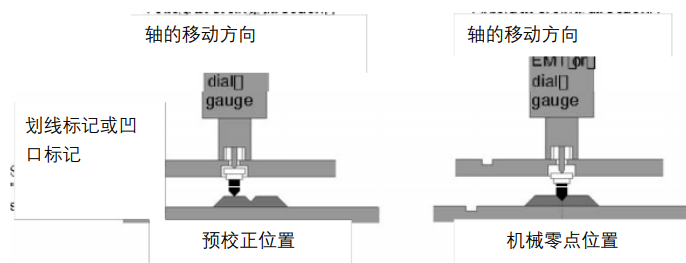
当通过零点刻槽谷底时, 检测探针到达低点, 机械零点位置便到达。 电子检测探头发送一个电信号到控制装置。 如果使用千分表, 零点位置能通过陡峭的反转指示验证。 预校正位置可以使机器人各轴较容易移动到零点位置。 预校正位置可以通过划线标记或刻槽标记识别。 机器人在校正前必须到达这个位置。
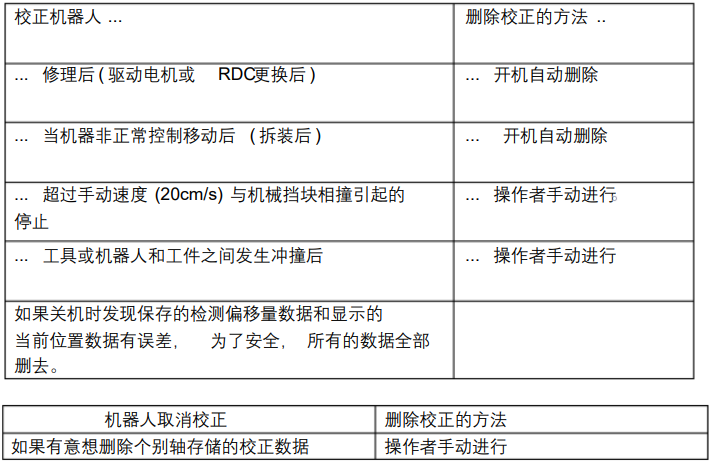
一个轴也许仅从“ +”到“ - ”就可以移动到机械零点位置。如果一个轴必须从“ - ”到“ +”转动,它首先必须转过预校正位置的标记处,然后再返回这个标记。这是很重要的,可以消除齿轮传动的反向间隙。 机器人在下列情况下必须校正:
更多机器人资讯请咨询:库卡机器人配件
