



KUKA机器人模拟量输入输出编程步骤方法全面解析
声明:本媒体部分图片、文章来源于网络,
版权归原作者所有,如有侵权,请与我联系删除
KR C4 具有 32 个模拟输入端
·为这些模拟信号需要配备可作为选项提供的总线系统,并须通过
·WorkVisual 进行设计
·模拟输入端通过系统变量 $ANIN[1] ... $ANIN[32] 读出
·(每隔 12 ms 一次)循环读取一个模拟输入端
·$ANIN[nr] 的值在 1.0 和 -1.0 之间变化,表示 +10V 至 -10V 的输入电压
函数:静态赋值
直接赋值
REAL value
value = $ANIN[2]
给信号协定赋值
SIGNAL sensor $ANIN[6]
REAL value
value = sensor
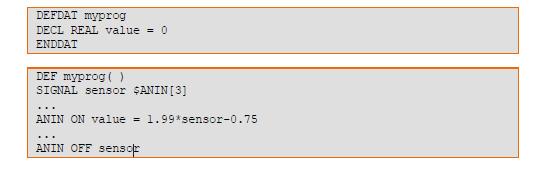
动态赋值
·所有用于 ANIN 指令中的变量必须已在数据列表中进行了声明(局部或在$CONFIG.DAT 中)。
·同时*多允许有三个 ANIN ON 指令。
·*多两个 ANIN ON 指令可使用相同的变量值或访问同一个模拟输入端。
·句法
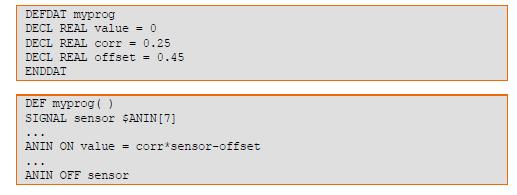
开始循环读取:
ANIN ON 值 = 系数 * 信号名称 <± 偏量>

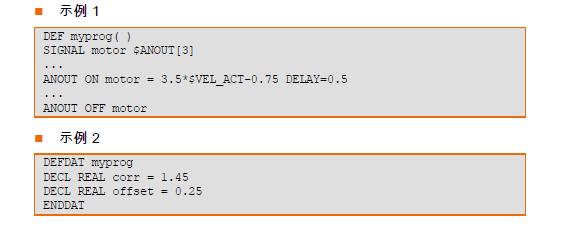
示例 1:
示例 2:
使用模拟输入端编程时的操作步骤:
注意:使用模拟信号的前提条件是设计正确的总线系统及其连接的模拟信号。
ANIN ON /OFF 的编程
1. 选择正确的模拟输入端
2. 执行信号协定
3. 在数据列表中声明必要的变量
4. 接通: 给 ANIN ON 指令编程
5. 检查是否*多 3 个动态输入端激活
6. 关断: 给 ANIN OFF 指令编程
给模拟输出端编程
KR C4 具有 32 个模拟输出端
·为这些模拟信号需要配备可作为选项提供的总线系统,并须通过
·WorkVisual 进行设计
·模拟输出端通过系统变量 $ANOUT[1] ... $ANOUT[32] 读出
·(每隔 12 ms 一次)循环写入一个模拟输出端。
·$ANOUT[nr] 的值在 1.0 和 -1.0 之间变化,表示 +10V 至 -10V 的输出电
注意:可同时使用 8 个模拟输出端(包括静态和动态)。 ANOUT触发一次预进停止。
静态赋值
·直接赋值
ANOUT[2] = 0.7 ; 在模拟输出端 2 上加上 7V 电压
·借助变量赋值
REAL value
value = -0.8
ANOUT[4] = value ; 在模拟输出端 4 上加上 -8V 电压
·借助联机表单编程
动态赋值
·所有用于 ANOUT 指令中的变量必须已在数据列表中进行了声明(局部或
·在 $CONFIG.DAT 中)。
·同时*多允许有四条 ANOUT ON 指令。
·ANOUT 触发一次预进停止。
·句法
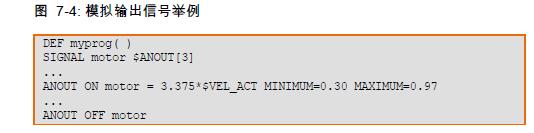
开始循环写入:
ANOUT ON 信号名称 = 系数 * 调节项 <± 偏量>

使用模拟输出端编程时的操作步骤:
注意:使用模拟信号的前提条件是设计正确的总线系统及其连接的模拟信号。
ANOUT ON /OFF 的编程
1. 选择正确的模拟输出端
2. 执行信号协定
3. 在数据列表中声明必要的变量
4. 接通: 给 ANOUT ON 指令编程
5. 检查是否*多 4 个动态输出端激活
6. 关断: 给 ANOUT OFF 指令编程

更多机器人咨询请点击:http://www.kukaaccessory.gbsrobot.com/