



为了实现库卡机器人视觉引导系统的高度自动化,充分发挥机器人高效率、高柔性和高智能化水平。视觉引导系统是由机器人系统、视觉系统、总线系统、识别系统、辅助系统组成的一套完整设备。本系统先由视觉系统拍摄工件照片,二值化处理后提取特征点的图像坐标,通过视觉系统计算出工件坐标系的矫正量,视觉系统常将上述结果转换为十六进制数据传输给机器人, 这些数据将指导机器 人建立新的工件坐标系。整个系统的内部模拟信号的传递,机器人指令的传达等都通过总线系统来完成的。
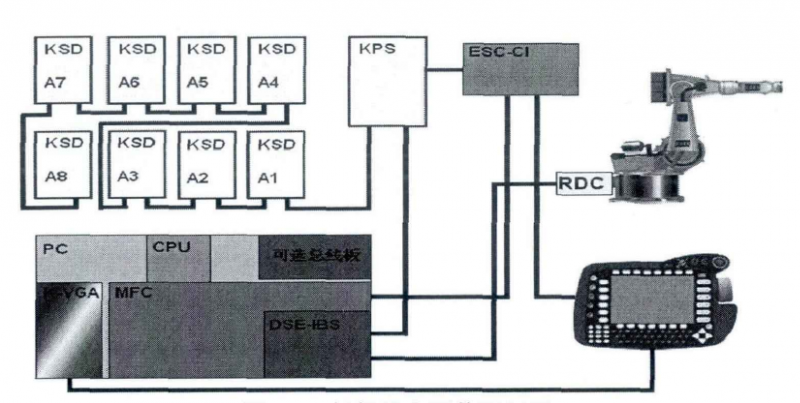
(1)库卡机器人系统:机器人系统由库卡机器人本体、机器人控制柜、示教器和其他辅助设备组成。本系统分为动力部分和控制部分,动力部分包括六轴电机的驱动电源、机器人PC机的动力电源和网络部分的控制电源。图示中预留了两个电机轴控制器(现在新型机器人控制柜*高可配十八个控制器),实际应用中常在此接上与机器人六轴相同类型的专用电机来作为机器人外部轴,外部轴的使用增加了机器人的自由度,扩大了机器人的作业空间。机器人系统采用了PC技术,用工业标准的PC理论来控制机器人,操作界面灵活,各种共用和专用的端口齐全。利用工业标准的PCI和ISA插槽和相应的功能卡,十分方便地接入DeviceNet, InterBus、 ControlNet 等各种类型工业总线。
(2) 视觉系统:机器人作为视觉引导系统的执行单元,而视觉系统部分则是补偿单元。视觉系统的任务是通过摄像机采集现场工件图片,对图片进行特征提取,通过内部算法计算出工件坐标系的偏差量,然后将数据传送给PLC或直接传给机器人。整个视觉系统包括摄像机单元、照明单元、控制单元和标定单元。摄像单元通常含有一个或多个摄像头、保护罩和安装支架。摄像机与被拍摄平面之间*佳角度为45°,这样易于从拍摄的特征基准获取空间信息:照明单元根据相机数目配取相应光源,一般使用卤素射灯配灯光控制单元;控制单元包括工控机,图像采集卡,总线通讯网卡,显示器等:标定单元包括标定板,标定针,标定球及标定支架等。
(3)总线系统:总线工业自动化设备中控制系统的纽带。目前应用较广的是CAN总线、DeviceNet 总线、ProfiBus 总线和EtherNet 总线等。总线的故障会造成各项设备的停机,将造成重大生产损失。因此还需运用各个总线接口技术,总线耦合板卡等,确保各个设备数据的可靠交换。对于有特殊要求的场合,可以选择相应的专用耦合设备,如西门子公司为不同网络而设计的DP/DPCloupler,可以实现两个DP网络间的数据交换;对于若干总线与工业以太网技术耦合的部分,可以按照相应的PCI专业板卡处理,转换成数字信息进行处理。同时,在机器人控制PC柜内预留5个PCI插槽以满足各种总线的要求。实现不同种类总线工艺的过程,只需将各种总线协议的板卡加载到PCI插槽中即可;而后进步按照工位布线要求进行网络布局。
更多信息请咨询:库卡机器人