



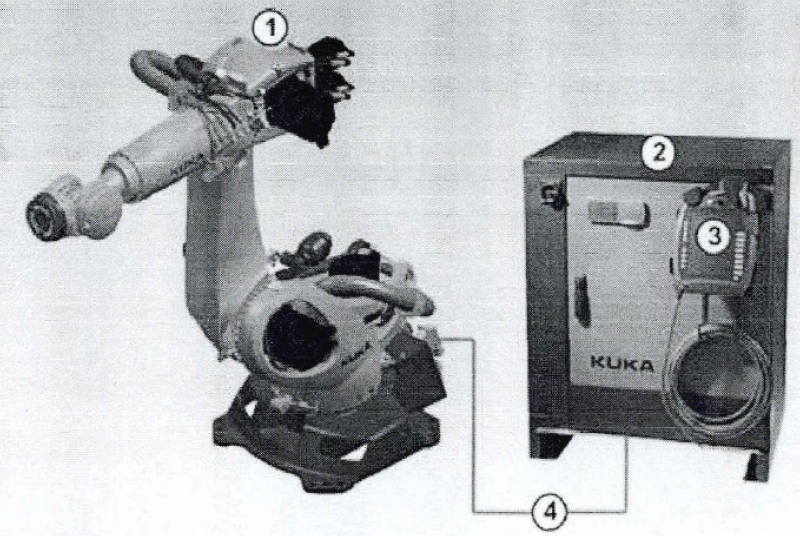
KUKA六轴工业机器人系统组成
①为KUKA六轴工业机器人本体,序号②为KUKA工业机器人的控制柜,序号③为库卡六轴工业机器人的手持式示教编程控制器,序号④为电路电线。
KUKA六轴工业机器人控制柜
KUKA机器人各种运动模式和其他设备交互都是靠控制柜来控制。控制柜(CCU)是机器人控制系统所有部件的配电装置和通讯接口。CCU由控制柜接口板(CIB)和电源管理板(PMB)组成。所有数据通过内部通讯传输给控制系统,并在那里继续处理。当电源断电时,控制系统部件接受蓄电池供电,直至位置数据备份完成以及控制系统关闭。通过负载测试检查蓄电池的充电状态和质量。
KUKA六轴工业机器人机械手爪
在自动化生产线上,尤其是在目前智能制造的“智能工厂4.0”的生产 制造中,工业机器人扮演着极其重要的角色,而这*核心的就是靠着不同的机械手爪来进行抓取作业,配合完成各种工作。要满足自动化生产的要求,首先就要有很强的通用性,而工业机器人的通用性能是非常好的,面对不同的工件,只需要使用相应的机械手爪来进行替换,就可以完成相应的作业要求。也正是因为每一种机械手爪跟工件都是一一对应的,导致了机械手爪的种类也特别多,目前*常用的有二手指的气动机械手爪、三手指的气动机械手爪、吸盘式机械手以及特种专用定制机械手爪等。作业时都是统-安装在工业机器人末端轴的法兰盘上面。当然在实际应用中,可以根据不同的机械手爪,选择合适的安装方式,总的目的是为了更加便捷的进行自动化的生产制造。
KUKA六轴工业机器人编程
KUKA六轴工业机器人运动编程的编程语言是KRL-KUKA Robor Languge,KRL语言是KUKA库卡工业机器人的专属编程语言.KRL编程语言包含了KUKA机器人运动指令及逻辑语法。
KUKA机器人编程有两种:一种是通过示教暴示教编程,还有一种是通过离线编程软件进行离线编程。由同时后期售后费用更贵、售后难度更高,在实际工程项目应用中,往往只需要示教编程就可以解决,所以在目前的KUKA机器人应用中,更多的是用KUKA手持式示教器进行示教编程。也可以通过KUKA机器人编程软件的小插件workvisual来编好程序,然后再拷贝到KUKA机器人系统中去进行运行。KUKA机器人编程首先要创建编程程序模块,每一个程序模块都包含该模块的SRC源代码和DAT数据列表两部分,可以对程序中的每一句程序语言进行复制、修改、替换、删除等操作,也可以对程序模块进行相同的操作。程序语言包含了很多运动指令和逻辑语法,例如点到点的运动指令PTP,直线运动,指令Lim.圆弧运动指令C等,每编写完个程序,创建完成一个程序模块, 都可以进行存盘。如下所示为一个完整的程序模块。
KUKA机器人的编程模式分为三种:专家编程模式,客全用户编程模式、普通用户编程模式。当要对里面的程序模块进行修改时,直接进入专家编程模式就可以。不同的编程模式对应的安全等级不同。
更多信息请咨询:库卡机器人