



随着焊接生产自动化和智能化的迅速发展,视觉传感系统成了机器人焊接中必不可少的重要部分。具有视觉功能的示教再现焊接机器人具有灵活性大,适应能力强、智能化程度高等特点。基于现在的技术水平,完全脱离人于预的智能焊接机器人还在研究阶段。如果利用人的智能,再借助于视觉传感系统,使焊接机器人能实时地对焊接环境进行感知、焊缝跟踪、自动识别被焊接头的形式、路径规划以及焊接参数调整等,从而实时控制焊缝质量,这样就可以大大提高焊接生产效率。此外,有视觉功能的示教再现焊接机器人可替代人类在严酷环境(如水下、太空、核辐射环境")下实现自动焊接施工,能减轻人类直接作业的难度和危险度,确保特殊场合下焊缝质量的稳定性和可靠性。
库卡焊接机器人系统由机器人控制器、焊接系统、机器人、变位机和远距离操作端等等组成。在不同的焊接系统中,它的配置可能不同,有些焊接机器人可能没有变位机,而有些系统可能没有远距离操作端或者两者都没有,这要视焊接机器人系统的工作要求和工作任务而定。
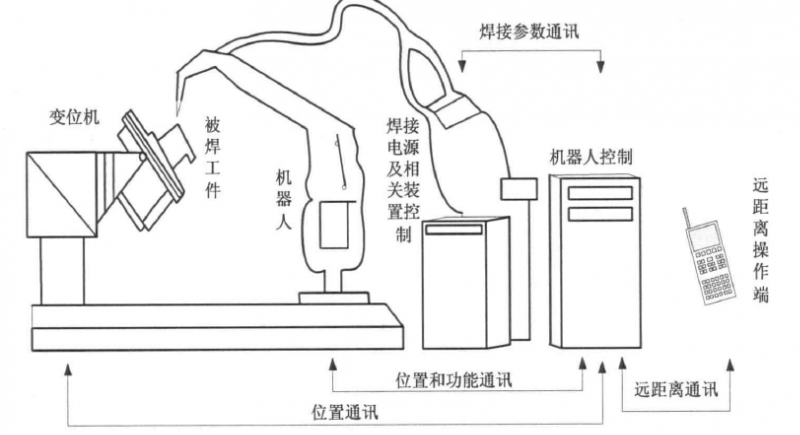
库卡焊接机器人控制器是焊接机器人系统的神经中枢,它由计算机硬件、软件和一-些专用电路组成。计算机硬件是软件系统的运行平台,软件的功能*后通过硬件去实现;控制器的软件由系统软件和用户软件组成,其中包括机器人专用语言翻译,机器人运动学和动力学计算,焊接系统控制,和自诊断、自保护软件等;专用电路完成系统参数的采集,系统的输出控制等。控制器负责整个机器人系统参数的采集运算和控制。
焊接系统是机器人完成工作任务的核心设备,主要由焊接控制器、 焊枪、送丝机构、温控系统及电、气等辅助部分组成。焊接控制器是由微处理器及部分外围接口芯片组成的控制系统,它能根据预定的焊接程序,完成焊接参数输入、焊接程序控制及焊接系统故障自诊断,并实现与焊接机器人控制器的通讯。用于弧焊机器人的焊接电源及送丝设备由于参数选择的需要,必须由机器人控制器直接控制,电源在功率和接通时间上必须与自动过程相符。现在生产的焊接电源大多
设计了此功能,可以方便的与焊接机器人控制器进行接口,实现它们之间的焊接参数通讯。
机器人(机械手)是焊接机器人系统的执行机构、它由驱动器、传动机构、机器人臂、关节和内部传感器等组成。它的任务是**地保证末端操作器所要求的位置,姿态和实现其运动。机械手从结构上应具有三个以上可自由编程的运动关节,可将其分为主要关节和次要关节两个层次,不同数目和层次关节的组合决定了相应的机器人工作空间。从运动学上已经证明具有六个旋转关节的铰接开链式机械手能以*小的结构尺寸为代价获取*大的工作空间,并且能以较高的位置精度和*优的路径到达指定位置",因而在焊接机器人上广泛应用这种类型的机械手。
变位机作为机器人焊接生产线及柔性加工单元的重要组成部分,其作用是将被焊工件放置成*佳的焊接位姿。在焊接作业前和焊接过程中,变位机通过夹具来装卡和定位被焊工件,对工件的不同要求决定了变位机的负载能力及运动方式。为了使机器人能充分发挥效能,焊接机器人系统通常采用两台变位机,这样当其中一台在焊接时,另一台变位机可以进行工件的装卸,从而使整个系统获得*高的费用性能比。
远距离操作端是焊接机器人的附件部分,它可以是远程控制工作站,也可以是便携的示教编程器。通过它,操作人员可以在远程进行焊接机器人系统的操作,包括远程控制、示教编程、工作任务远程下达等,这对于焊接机器人向太空,深海领域的发展具有重要的意义。
更多信息请咨询:库卡机器人