



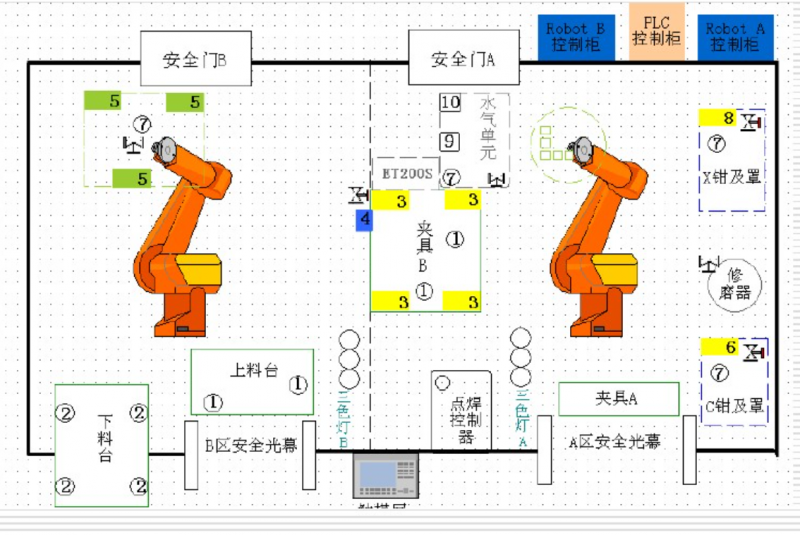
两台机器人可以独立进行操作(KUKA A系统和KUKA B系统),也可以组合到一起形成一个系统(KUKA AB系统)。
1)独立机器人系统A:在夹具A上装好工件(3个左右) ,点“确定”后,A系统开始工作,机器人A通过自动工具快换装置携带X型焊钳焊接工件,然后将X型焊钳放下,再更换C型焊钳焊接工件,焊接完毕后,将C型焊钳放到焊钳支架上,人工将工件取出,工件焊接完毕,一个工作循环结束。
2)独立机器人系统B:在上料台上放一个车门,在触摸屏上选择操作"KUKA B系统",点"确定"后,B系统开始工作,机器人B携带抓具将车门从上料台取出放到夹具B.上面,放完车门后机器人离开夹具B,夹具B夹紧,等待10秒后,夹具B打开,机器人B携带抓具将车门从夹具B上取出,然后将车门放到下料台上,一个工作循环结束。
3)整个系统(KUKA AB系统) :操作者在上料台,上放一个车门,然后在触摸屏上选择操作"KUKA AB系统",点"确定"后,机器人B携带抓具将车门从上料台上取出放到夹具B上,夹具B夹紧,机器人A更换C型焊钳,在夹具B上焊接车门,焊接完毕后,夹具B打开,机器人B将车门取出放到下料台上,在机器人B工作的同时,机器人A再焊接夹具A上的工件,焊接完毕后,人工取出工件。
触摸屏:
系统模块:对相关的电磁阀实现手动动作,检查电磁阀及气缸工作是否正常。或者由于需要,需要对气缸进行手动操作时。
信号控制:利用触摸屏可以监测机器人A和机器人B与PLC在“EXT"外部自动方式通讯时相关的信号状况,当PLC有信号传送到ROBOT时,相关的信号将有显示,同样,当ROBOT有信号传送到PLC时,相关的信号将有显示。
更多信息请咨询:库卡机器人