



数据库+软件建立出库卡机器人新型的编程方式

数据库+软件建立出库卡机器人新型的编程方式
在工业生产的焊接、喷涂、打磨、混合、包装、堆垛、装配、搬运等工序,加工对象的形状和尺寸复杂多变,使用工业机器人能很好地适应这些场景。
传统的库卡机器人编程的应对方法是为每一种产品每一种形状尺寸的加工轨迹编制一段子程序,生产时通过识别或检测技术调用对应的子程序,动态调用改变机器人的运行轨迹和姿态,这种方法能适应少量不同的产品,但由于机器人内存的限制,装载子程序的数量是有限制的,不能快速切换适应更多的加工对象。这时必须暂停运转生产设备,由专业人员使用编程器修改程序,载入新的子程序继续生产,这样设备停机导致利用率的下降。
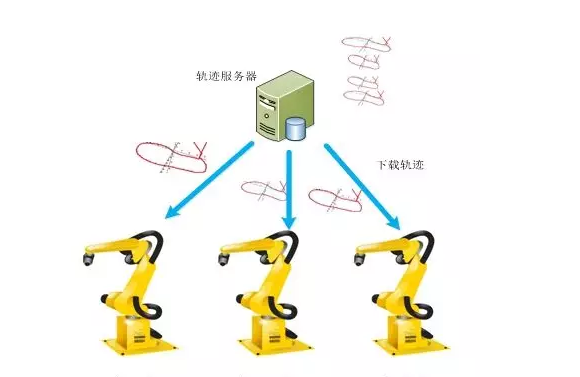
FlexRobot®解决方案使用数据库和软件的方式来建立、存储、编辑、示教轨迹,机器人程序只须编写一条轨迹子程序;轨迹数据或轨迹运行规则保存在具有海量存储空间的硬盘上,增加新产品只须建立、示教、保存一次;生产时,FlexRobot®从数据库读取轨迹,或以识别技术获取加工对象的标识并以轨迹运行规则计算机器人轨迹,通过Robot-link协议,将数据下载到机器人内存,克服一般的库卡机器人程序需要加载全部轨迹降低性能的缺点,达到快速实时切换轨迹的灵活控制。
数据库+软件建立出库卡机器人新型的编程方式
解决方案特点
灵活性:FlexRobot®组合库卡机器人,可用于多种不同的任务。例如,根据任务的不同,只需要更换工具头,并且在FlexRobot®的软件界面上简单设置,就可以随意切换不同的工作。与无FlexRobot®控制的机器人比较的优势无需为每个轨迹编写子程序,与专机的相比的优势。
成本优势:响应应机器换人的政策,免除工人在恶劣环境下工作,克服人为因素对于产品质量的影响,在人口红利减少的形势下,提高工人的满意度。
节约人力资源:不需要熟识使用编程器的工业机器专业人员,节省宝贵的人力资源。
提高设备利用率:无论切换任何数量的库卡机器人轨迹,也无需暂停设备,达到连续连续生产,提高OEE。