



库卡机器人同一平面运动、相对位置、建立通讯、使用I/O大解答

1.库卡机器人如何在一 个平面内运动
解决办法:设置工具坐标、基座标,然后在调用PTP、 LIN、CIRC指令时设置所用坐标为基座标即可
2.如何让库卡机器人走相对位置
解决方式:通过查资料及试验发现,展开所用命令LIN P1所走的P1点的坐标存在XP1中,XP1是E6POS类型;可直接对XP1X,XP1Y,XP1Z,XP1 A,XP1 B,XP1C这六个坐标参数赋值,赋完值后,再执行LIN XP1机器人就会走到赋值的坐标点,如此便可进行相对赋值,如P2点需要在P1点x轴方向再前进200mm,则可设为XP2.X=XP1.X+200;将当前库卡机器人坐标值赋给指定的P3点方法为XP3=SPOS_ ACT
库卡机器人同一平面运动、相对位置、建立通讯、使用I/O大解答
3.如何与库卡机器人建立通讯
解决方法:当库卡机器人为客户端时,写一个外部电脑的服务器程序,设置外部电脑IP,开启服务器监听程序,库卡机器人端按照所给示例设盖对应的XML配置文件,写相应的运行代码,解析通讯数据并做相应的回应,然后运行,通讯时外部电脑关掉防火墙,否则通讯不上。机器人做服务器也是同理,区别只在于:机器人方面,XML配置文件中要改一下设置,外部电脑要改成客户端程序。
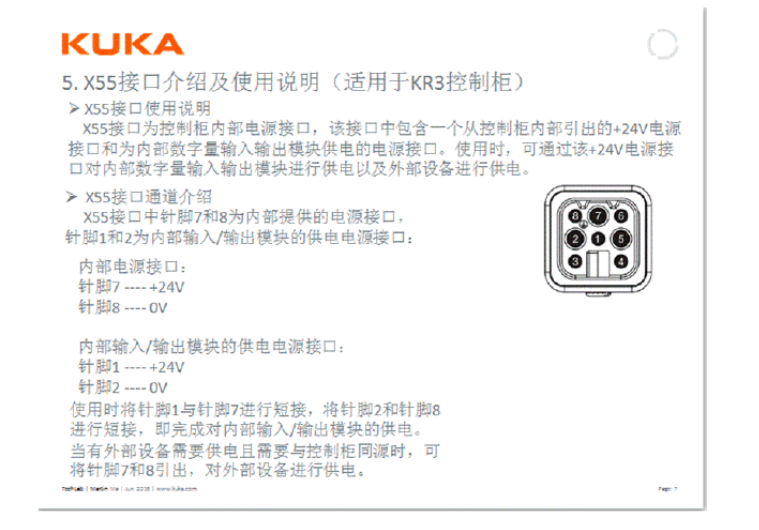
4.库卡机器人外部 I0如何使用
解决方法:库卡机器人外部10由机器人自身供电,接线方式如下:
库卡机器人同一平面运动、相对位置、建立通讯、使用I/O大解答